ros系统包,构建智能机器人生态圈的基石
时间:2025-01-17 来源:网络 人气:
亲爱的机器人爱好者们,你是否曾为搭建一个属于自己的机器人操作系统而烦恼?别担心,今天我要带你走进ROS(Robot Operating System)的世界,一起探索那些神奇的ROS系统包!
ROS系统包:机器人世界的“瑞士军刀”
ROS,全称机器人操作系统,是一个开源的机器人软件平台,它为开发者提供了一个强大的工具集,让你可以轻松地构建、测试和部署机器人应用程序。而ROS系统包,就像是这个平台上的“瑞士军刀”,几乎能满足你所有关于机器人编程的需求。
一、ROS系统包的起源与魅力

ROS的起源可以追溯到2010年,当时Willow Garage公司推出了PR2机器人,并基于这个项目开发了一套机器人操作系统。随着时间的推移,ROS逐渐发展成为一个全球性的开源项目,吸引了无数开发者的关注。
ROS系统包的魅力在于它的多样性和灵活性。无论是激光导航、SLAM(同步定位与地图构建)还是深度学习,ROS系统包都能为你提供相应的解决方案。而且,ROS系统包的更新速度非常快,几乎每个月都会有新的功能包加入。
二、ROS系统包的分类与功能
ROS系统包可以分为以下几类:
1. 感知系统包:这类包主要处理机器人的感知任务,如激光雷达、摄像头等。例如,rplidar-ros包就是针对思岚科技RPLIDAR激光雷达的ROS功能包。
2. 导航系统包:这类包主要处理机器人的导航任务,如路径规划、避障等。例如,amcl和gmapping包就是两个非常流行的导航系统包。
3. 运动控制系统包:这类包主要处理机器人的运动控制任务,如关节控制、轨迹规划等。例如,joint_state_publisher和robot_state_publisher包就是两个常用的运动控制系统包。
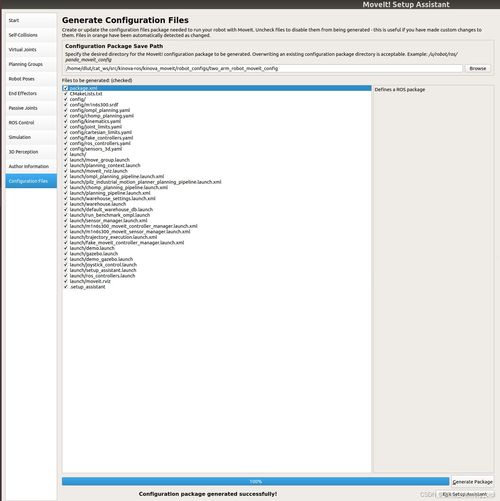
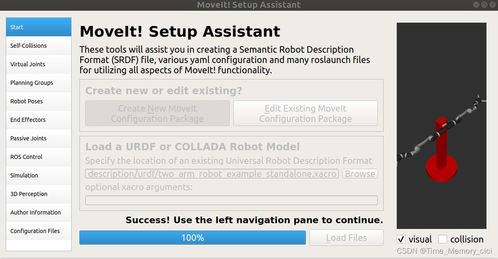
4. 仿真系统包:这类包主要用于机器人的仿真和测试。例如,gazebo和urdf模型包就是两个非常流行的仿真系统包。
三、ROS系统包的安装与使用
安装ROS系统包非常简单,只需在终端输入以下命令:
sudo apt-get install 包名
例如,要安装rplidar-ros包,只需输入以下命令:
sudo apt-get install rplidar-ros
安装完成后,你就可以在ROS工作空间中导入并使用这个系统包了。
四、ROS系统包的二次开发
ROS系统包的二次开发非常方便。你可以在ROS工作空间中创建自己的ROS包,并根据自己的需求修改和扩展系统包的功能。
例如,如果你想为rplidar-ros包添加一个新的功能,你可以在ROS工作空间中创建一个新的功能包,然后在CMakeLists.txt文件中添加以下内容:
find_package(rplidar-ros REQUIRED)
include_directories(${rplidar-ros_INCLUDE_DIRS})
这样,你就可以在新的功能包中使用rplidar-ros包的功能了。
五、ROS系统包的未来
随着机器人技术的不断发展,ROS系统包将会变得越来越强大。未来,ROS系统包可能会在以下几个方面取得突破:
1. 更强大的感知能力:随着传感器技术的进步,ROS系统包将会支持更多类型的传感器,如深度相机、毫米波雷达等。
2. 更智能的导航能力:随着人工智能技术的应用,ROS系统包将会实现更智能的导航算法,如基于深度学习的路径规划。
3. 更灵活的运动控制:随着机器人关节技术的进步,ROS系统包将会支持更多类型的机器人关节,如伺服电机、步进电机等。
ROS系统包是机器人开发者不可或缺的工具。通过学习ROS系统包,你将能够轻松地搭建自己的机器人操作系统,并实现各种机器人应用。让我们一起期待ROS系统包的未来吧!
相关推荐




教程资讯
教程资讯排行