
pi系统震荡,PI控制系统震荡分析与解决策略
时间:2024-11-20 来源:网络 人气:
PI控制系统震荡分析与解决策略
随着工业自动化程度的不断提高,PI(比例-积分)控制器因其结构简单、参数调整方便等优点,被广泛应用于各种控制系统中。然而,在实际应用中,PI控制器可能会出现震荡现象,影响系统的稳定性和性能。本文将对PI控制系统震荡的原因进行分析,并提出相应的解决策略。
一、PI控制系统震荡的原因
1. 参数设置不合理:PI控制器的参数包括比例系数Kp和积分系数Ki,这两个参数的设置对系统的稳定性至关重要。如果参数设置不合理,可能会导致系统出现震荡现象。
2. 系统模型不准确:在实际应用中,系统模型往往存在一定的误差,这会导致控制器无法准确跟踪期望值,从而引发震荡。
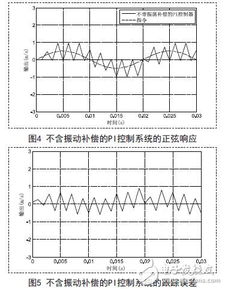
3. 外部干扰:系统在运行过程中可能会受到外部干扰,如负载变化、传感器误差等,这些干扰可能导致系统输出出现波动,进而引发震荡。
4. 控制器设计不合理:控制器的设计对系统的稳定性有很大影响。如果控制器设计不合理,如滤波器设计不当、采样频率过低等,都可能导致系统出现震荡。
二、解决PI控制系统震荡的策略
1. 优化参数设置:合理设置PI控制器的参数是解决震荡问题的关键。可以通过以下方法进行优化:
(1)采用试错法:通过不断调整Kp和Ki的值,观察系统响应,找到合适的参数组合。
(2)基于经验公式:根据系统特性和期望性能,选择合适的经验公式计算Kp和Ki的值。
(3)采用自适应控制算法:根据系统运行状态,动态调整Kp和Ki的值,以适应不同的工况。
2. 改进系统模型:提高系统模型的准确性,可以减少模型误差对系统稳定性的影响。具体方法包括:
(1)采用更精确的数学模型:根据实际系统特性,选择合适的数学模型描述系统。
(2)进行模型辨识:通过实验数据对系统模型进行辨识,提高模型精度。
(3)采用鲁棒控制方法:针对模型不确定性,采用鲁棒控制方法提高系统稳定性。
3. 降低外部干扰:针对外部干扰,可以采取以下措施:
(1)采用滤波器:对输入信号进行滤波处理,降低干扰的影响。
(2)提高传感器精度:选用高精度的传感器,减少传感器误差。
(3)优化控制系统设计:通过优化控制器设计,提高系统对干扰的抵抗能力。
4. 优化控制器设计:针对控制器设计,可以采取以下措施:
(1)采用先进的控制算法:如模糊控制、神经网络控制等,提高控制器的性能。
(2)优化滤波器设计:选择合适的滤波器,降低噪声对系统的影响。
(3)提高采样频率:提高采样频率,减少采样误差对系统的影响。
PI控制系统震荡是实际应用中常见的问题,通过分析震荡原因,采取相应的解决策略,可以有效提高系统的稳定性和性能。在实际应用中,应根据具体系统特性和需求,选择合适的解决方法,以达到最佳的控制效果。



教程资讯
教程资讯排行









