
ros 系统,ROS系统应用与开发实践
时间:2025-01-13 来源:网络 人气:
亲爱的机器人爱好者们!你是否曾梦想过亲手打造一个属于自己的机器人?别急,今天我要带你走进一个神奇的世界——ROS系统,它可是机器人界的“安卓操作系统”,能让你轻松实现这个梦想哦!
ROS系统:机器人界的“安卓”
想象手机界的安卓操作系统就像机器人界的ROS系统。它向上可以扩展各种应用,向下可以适应不同的硬件设备。ROS(Robot Operating System,机器人操作系统)提供了一系列程序库和工具,帮助开发者轻松创建机器人应用软件。它就像一个强大的“大脑”,让机器人能够感知环境、做出决策、执行任务。
模块化、分布式:ROS系统的核心

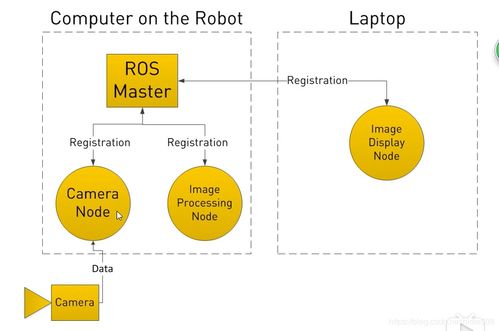
ROS系统采用模块化和分布式的设计理念。模块化意味着每个.lanuch文件都相当于一个机器人,每个node节点则相当于一个模块。这样,你可以根据自己的需求,灵活地组合和扩展机器人功能。
分布式设计则让ROS系统可以在多个计算机上运行,实现计算任务的合理分配。比如,你可以使用一台电脑处理视觉识别任务,另一台电脑负责路径规划,而第三台电脑则负责控制机器人行动。
安装ROS系统:开启你的机器人之旅
想要开始使用ROS系统,首先需要安装它。以下是在Ubuntu系统上安装ROS系统的步骤:
1. 安装虚拟机:由于ROS系统需要较高的运算能力,你可以先在电脑上安装虚拟机,然后在虚拟机中安装Ubuntu系统。
2. 安装Ubuntu系统:选择Ubuntu 20.04 LTS版本,并按照官方教程进行安装。
3. 安装ROS系统:在Ubuntu系统中,使用以下命令安装ROS系统:
```
sudo apt-get update
sudo apt-get install ros-noetic-desktop-full
```
4. 初始化ROS环境:安装完成后,使用以下命令初始化ROS环境:
```
source /opt/ros/noetic/setup.bash
```
5. 创建ROS工作空间:在ROS系统中,工作空间是存放项目文件的地方。使用以下命令创建工作空间:
```
cd ~
catkin_make
```
6. 配置环境变量:将ROS工作空间的路径添加到环境变量中,以便在命令行中直接使用ROS命令。
ROS系统:丰富的工具和库
ROS系统提供了丰富的工具和库,帮助你轻松实现机器人开发。以下是一些常用的工具和库:
硬件抽象:ROS系统支持多种硬件设备,如传感器、执行器等,并提供相应的驱动程序。
消息传递:ROS系统采用消息传递机制,实现机器人各个模块之间的通信。
可视化工具:ROS系统提供了多种可视化工具,如RViz,可以帮助你实时查看机器人状态和传感器数据。
软件包管理:ROS系统提供了软件包管理工具,方便你查找、安装和管理机器人应用软件。
ROS系统:强大的社区支持
ROS系统拥有一个庞大的社区,你可以在这里找到各种资源,如教程、论文、书籍等。此外,你还可以加入ROS社区,与其他开发者交流心得,共同进步。
ROS系统:开启你的机器人梦想
ROS系统是一个功能强大的机器人开发平台,它可以帮助你实现各种机器人应用。无论是自动驾驶、工业机器人,还是家庭服务机器人,ROS系统都能为你提供强大的支持。
现在,就让我们一起开启这段奇妙的机器人之旅吧!相信在ROS系统的帮助下,你的机器人梦想一定会实现!
相关推荐




教程资讯
教程资讯排行









