
ros系统 安卓,构建智能机器人生态圈
时间:2025-01-04 来源:网络 人气:
亲爱的读者们,你是否曾梦想过拥有一台能够与你互动的机器人?想象它不仅能听懂你的指令,还能在复杂的任务中游刃有余。今天,就让我带你走进一个神奇的世界——ROS系统与安卓的结合,看看它们是如何携手打造出智能机器人的吧!
ROS系统:机器人界的安卓操作系统

ROS,全称Robot Operating System,中文翻译为机器人操作系统。它就像安卓系统在手机界的地位一样,向上可以扩展不同应用,向下可以适应不同的硬件设备。ROS的模块化、分布式系统设计,使得它成为了机器人开发者的首选。
在ROS中,每个.lanuch文件都相当于一个机器人,每个node节点则相当于一个模块。这种设计让开发者可以轻松地将不同的功能模块组合在一起,形成一个完整的机器人系统。而且,ROS支持分布式计算,这意味着你可以使用多个计算机(实际上是CPU)来处理不同模块的计算任务,大大提高了系统的性能。
安卓:移动设备的王者
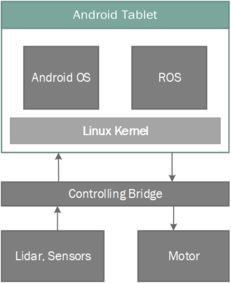
说到移动设备,安卓系统绝对是当之无愧的王者。它拥有丰富的应用生态,几乎可以满足用户的各种需求。而在机器人领域,安卓系统也有着广泛的应用。许多跑安卓系统的板子,俗称上位机,负责处理机器人的导航、运动等底盘控制任务。
那么,如何让ROS系统与安卓系统无缝对接呢?这就需要借助一些特殊的工具和协议。
ROSBridge:搭建安卓与ROS的桥梁
ROSBridge是一个基于ROS的通信库,它允许安卓设备与ROS系统进行通信。通过ROSBridge,安卓设备可以发送和接收ROS消息,从而实现与ROS系统的交互。
ROSBridge的工作原理是这样的:安卓设备上的客户端节点与一个代理节点进行C/S通信,然后代理节点再将请求转发给ROS系统中的server节点。这样,安卓设备就不需要实现整个ROS平台,只需要与代理节点通信即可。
这种设计的好处是,安卓设备可以专注于自己的任务,而无需处理复杂的ROS系统。同时,ROS系统也可以轻松地与安卓设备进行交互,实现更加智能化的功能。
ROS实时采集Android的图像和IMU数据
想象如果你的机器人能够实时采集周围环境的图像和IMU数据,那该有多么酷炫!而ROS系统与安卓的结合,正是实现这一功能的利器。
例如,一些基于手机摄像头的机器人,可以通过安卓系统实时采集图像数据,并将其发送到ROS系统进行处理。同样,手机内置的IMU(惯性测量单元)也可以实时采集加速度、陀螺仪等数据,为机器人提供更加精准的运动控制。
为了实现这一功能,开发者需要将安卓手机与ROS系统连接在同一局域网下。在安卓手机上运行一个专门的应用程序,将采集到的图像和IMU数据打包成ROS消息格式,发送到ROS系统。在ROS系统中,你可以订阅这些消息,并进行进一步的处理。
ROS与安卓:未来智能机器人的基石
随着科技的不断发展,ROS系统与安卓的结合将会在机器人领域发挥越来越重要的作用。它们将共同推动机器人技术的进步,为我们的生活带来更多便利。
在这个充满无限可能的未来,我们可以期待看到更多基于ROS系统与安卓结合的智能机器人。它们将能够更好地理解人类的需求,为我们的生活带来更多惊喜。
ROS系统与安卓的结合,为机器人领域带来了新的机遇。让我们共同期待,这些智能机器人将如何改变我们的世界吧!
相关推荐




教程资讯
教程资讯排行









