
ros管理系统,构建智能机器人生态圈的基石
时间:2025-01-01 来源:网络 人气:
亲爱的读者们,你是否曾梦想过自己也能成为机器人世界的创造者?想象那些在科幻电影中灵活穿梭的机器人,其实离我们并不遥远。今天,就让我带你走进ROS(机器人操作系统)的世界,一起探索这个充满无限可能的机器人管理系统。
ROS:机器人世界的“大脑”

ROS,全称Robot Operating System,是一个开源的机器人操作系统。它就像机器人世界的“大脑”,为开发者提供了一套完整的工具和库,帮助他们轻松地构建、测试和部署机器人应用程序。ROS的主要特点包括:
- 分布式计算能力:ROS支持分布式计算,允许多个计算机或设备协同工作,通过网络进行通信。这意味着,你可以将复杂的任务分配给多个机器人,让它们共同完成任务。
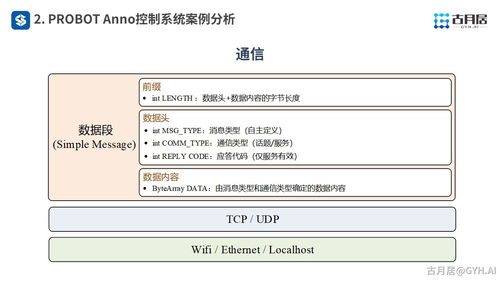
- 消息传递:ROS使用了一种进程间通信(IPC)机制,可以在不同的节点之间传递数据。这种机制使得机器人之间的信息交流变得简单高效。
- 包管理:ROS提供了一个包管理系统,允许用户分享和安装软件组件。这意味着,你可以轻松地找到并使用其他开发者创建的软件包,提高开发效率。
- 工具和库:ROS提供了一系列工具和库,例如用于3D渲染的RViz,用于模拟机器人的Gazebo,以及用于路径规划的navigation stack等。这些工具和库可以帮助你更快地开发出功能强大的机器人应用程序。
ROS的架构:层层递进,环环相扣

ROS的架构可以分为以下几个层次:
- OS层:这是经典意义的操作系统,为ROS提供运行环境。
- 中间件层:这是ROS的核心,负责处理消息传递、服务调用、动作调用等。
- 工具和库层:这一层提供了各种工具和库,帮助开发者完成开发任务。
- 应用层:这是最上层,包含了各种机器人应用程序。
ROS的安装与配置
要开始使用ROS,首先需要安装和配置它。以下是一些基本的步骤:
1. 安装ROS:你可以从ROS官方网站下载并安装ROS。根据你的操作系统,选择合适的版本进行安装。
2. 配置ROS环境:安装完成后,需要配置ROS环境。这包括设置环境变量、创建工作空间等。
3. 安装依赖项:ROS需要一些依赖项才能正常运行。你可以使用rosdep工具来安装这些依赖项。
4. 创建工作空间:工作空间是ROS项目的存储位置。你可以使用catkin_make工具来创建工作空间。
ROS的开发流程
使用ROS开发机器人应用程序,通常需要以下步骤:
1. 创建功能包:功能包是ROS项目的基本单元。你可以使用catkin_create_pkg命令来创建一个新的功能包。
2. 编写代码:在功能包中编写代码,实现你的机器人应用程序。
3. 编译功能包:使用catkin_make命令编译功能包。
4. 测试功能包:在测试环境中测试功能包,确保它能够正常运行。
5. 部署功能包:将功能包部署到机器人上,让它在实际环境中运行。
ROS的社区与资源
ROS拥有一个非常活跃的社区,你可以在这里找到各种资源,包括教程、文档、软件包等。以下是一些常用的ROS资源:
- ROS官方网站:提供ROS的最新信息、教程和文档。
- ROS问答社区:在这里,你可以向其他开发者提问,也可以回答其他人的问题。
- ROS软件包仓库:提供各种ROS软件包,你可以在这里找到你需要的软件包。
- ROS博客:分享ROS相关的文章和教程。
ROS是一个功能强大的机器人操作系统,它为开发者提供了一个简单、高效的平台,让他们能够轻松地构建、测试和部署机器人应用程序。无论是初学者还是经验丰富的开发者,ROS都是一个值得尝试的工具。让我们一起走进ROS的世界,探索机器人世界的无限可能吧!
相关推荐



教程资讯
教程资讯排行









