
pid控制系统框图,PID控制系统框图解析与应用
时间:2024-12-31 来源:网络 人气:330
PID控制系统框图:揭秘飞行控制的神秘面纱
亲爱的读者们,你是否曾想过,那些翱翔天际的无人机是如何保持稳定,精准操控的呢?今天,就让我们一起揭开PID控制系统框图的神秘面纱,一探究竟!
PID控制系统:飞控领域的“大脑”
在飞控领域,PID控制系统就像是一台精密的“大脑”,它负责解析飞行器的姿态、速度、位置等多维度参数,并实时调整,确保飞行器在空中如鱼得水。
PID,全称是比例(Proportional)、积分(Integral)、微分(Derivative),这三个字母分别代表了控制系统的三个核心环节。下面,我们就来一一揭秘它们的作用。
比例控制(P):误差的“即时反应者”

比例控制,顾名思义,就是根据误差的大小来调整控制力度。当飞行器偏离目标姿态时,比例控制会迅速计算出偏差量,并输出相应的控制信号,驱动舵机或电机产生修正力矩。
想象当你驾驶一辆汽车时,方向盘的反馈就是比例控制。当你稍微转动方向盘,汽车就会做出相应的调整,保持直线行驶。而在飞控系统中,比例控制就像是一位经验丰富的驾驶员,时刻关注飞行器的姿态,确保它稳定飞行。
积分控制(I):稳态误差的“消除者”
积分控制,顾名思义,就是将误差进行积分,从而消除稳态误差。当飞行器在持续外界干扰或系统固有特性影响下,姿态可能稳定于一个与目标姿态存在微小偏差的状态。
这时,积分控制就会发挥作用,通过不断累加误差,逐渐调整控制力度,最终使飞行器恢复到目标姿态。积分控制就像是一位耐心细致的医生,为飞行器进行“治疗”,消除稳态误差。
微分控制(D):速度的“感知者”
微分控制,顾名思义,就是根据误差的变化率来调整控制力度。当飞行器速度过快或过慢时,微分控制会迅速感知到这一变化,并输出相应的控制信号,使飞行器恢复到稳定状态。
微分控制就像是一位敏锐的侦探,时刻关注飞行器的速度变化,确保它始终保持在最佳状态。
PID控制系统框图:飞控领域的“指挥中心”
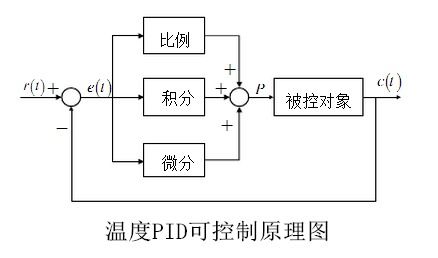
PID控制系统框图,是飞控领域的“指挥中心”,它将比例、积分、微分三个环节有机地结合在一起,形成一个完整的控制系统。
在这个框图中,我们可以看到:
- 参考输入:期望信号,即我们希望飞行器达到的目标姿态。
- 误差计算器:计算实际输出值与期望信号之间的误差。
- PID控制器:根据误差信号,输出相应的控制信号。
- 重复控制器:针对周期性扰动进行精确补偿。
- 被控对象:实际系统,输出实际飞行器的姿态。
通过这个框图,我们可以清晰地了解PID控制系统的工作原理,以及各个模块之间的相互关系。
PID控制系统在实际应用中的优势
PID控制系统在飞控领域具有以下优势:
- 稳定性:PID控制系统具有很好的稳定性,能够适应各种复杂环境。
- 精确性:PID控制系统能够实现对飞行器姿态、速度、位置等多维度参数的精准调控。
- 可靠性:PID控制系统具有很高的可靠性,能够在长时间运行中保持稳定性能。
PID控制系统框图是飞控领域的“神秘面纱”,它为飞行器提供了稳定的控制,让它们在空中如鱼得水。让我们一起为这个神奇的控制系统点赞,感谢它为人类带来的便利!




教程资讯
教程资讯排行









