
ros 系统,ROS系统简介
时间:2024-12-22 来源:网络 人气:
ROS系统简介
ROS(Robot Operating System)即机器人操作系统,是一个开源的机器人软件框架,旨在简化复杂机器人系统的开发过程。它由 Willow Garage 公司开发,并得到了全球开源社区的广泛参与和贡献。ROS为机器人开发者提供了一系列功能丰富的库和工具,使得机器人软件的开发变得更加高效和灵活。
ROS系统的特点

ROS系统具有以下特点:
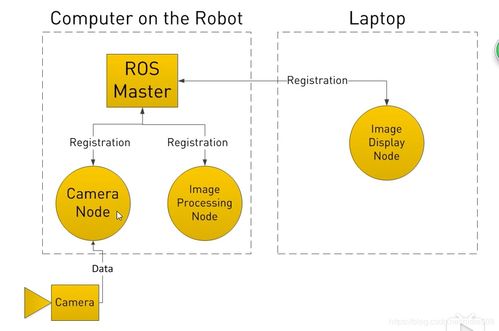
分布式架构:ROS采用分布式架构,各个节点可以运行在不同的计算机上,通过网络进行通信。这种架构使得机器人系统可以方便地扩展和分布式部署。
模块化设计:ROS将机器人系统分解为多个模块,每个模块负责特定的功能,便于开发者进行模块化开发和维护。
丰富的库和工具:ROS提供了一系列功能丰富的库和工具,包括传感器驱动、运动规划、导航、感知、控制等,满足不同类型机器人的开发需求。
跨平台支持:ROS支持多种操作系统,包括Linux、Windows和macOS,方便开发者在不同平台上进行机器人开发。
社区支持:ROS拥有庞大的开源社区,为开发者提供技术支持、交流平台和丰富的资源。
ROS系统的应用领域
ROS系统广泛应用于以下领域:
工业机器人:ROS为工业机器人提供了一套完整的开发工具,包括传感器驱动、运动规划、路径规划等,有助于提高工业机器人的智能化水平。
服务机器人:ROS为服务机器人提供了丰富的功能模块,如导航、避障、语音识别等,有助于开发出更加智能化的服务机器人。
无人机:ROS为无人机提供了飞行控制、导航、感知等功能模块,有助于开发出更加智能化的无人机系统。
自动驾驶:ROS为自动驾驶汽车提供了感知、决策、控制等功能模块,有助于推动自动驾驶技术的发展。
医疗机器人:ROS为医疗机器人提供了手术辅助、康复训练等功能模块,有助于提高医疗服务的质量和效率。
ROS系统的开发环境
ROS系统的开发环境主要包括以下几部分:
ROS包:ROS包是ROS系统的基本单元,包含了机器人系统的各个功能模块。
ROS工作空间:ROS工作空间是用于存放ROS包的目录,通常包含src、build、devel等目录。
ROS运行时:ROS运行时负责管理各个节点之间的通信和数据传输。
ROS工具:ROS提供了一系列工具,如rqt、rviz、gazebo等,用于调试、可视化、仿真等。
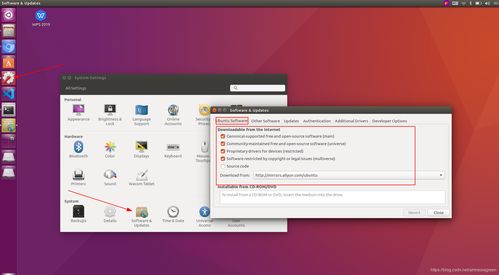
ROS系统的安装与配置

以下是ROS系统在Ubuntu 20.04系统上的安装与配置步骤:
更新系统软件包:
sudo apt update
安装ROS Noetic版本:
sudo apt install ros-noetic-desktop-full
配置环境变量:
echo
相关推荐


教程资讯
教程资讯排行









