ros系统包,ROS系统包概述
时间:2024-12-20 来源:网络 人气:
ROS系统包概述

ROS(Robot Operating System,机器人操作系统)是一个开源的机器人软件平台,它为机器人开发提供了丰富的库和工具。在ROS中,系统包(System Packages)是构成整个系统的基础,它们提供了ROS的核心功能和服务。
系统包的作用
系统包在ROS中扮演着至关重要的角色,它们为开发者提供了以下功能:
基础功能支持:如节点通信、话题发布/订阅、服务调用等。
工具和库:提供了一系列用于机器人开发的工具和库,如可视化工具、仿真工具、传感器数据处理库等。
系统管理:包括系统配置、依赖管理、包管理等功能。
ROS系统包的分类
ROS系统包主要分为以下几类:
基础系统包:提供ROS的核心功能,如rqt、roslaunch、roscore等。
工具包:提供各种开发工具,如rviz、gazebo、rosbag等。
库包:提供各种算法和数据处理库,如tf、image_transport、sensor_msgs等。
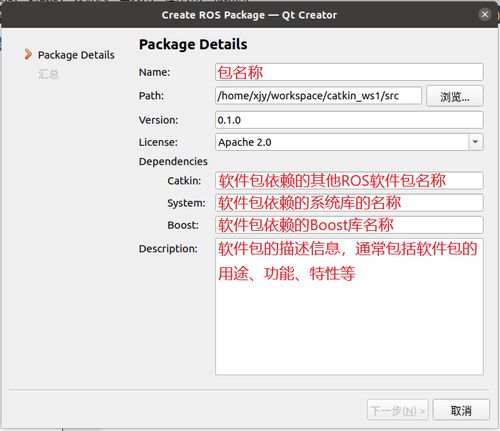
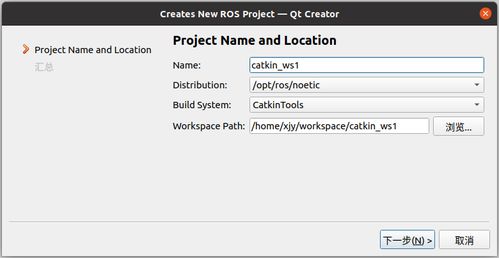
系统管理包:提供系统配置、依赖管理和包管理等功能,如rosdep、catkin等。
基础系统包详解
roscore:ROS系统的主节点,负责启动和运行ROS系统。
roslaunch:用于启动ROS节点和系统。
rqt:提供可视化工具,如rqt_graph、rqt_console等。
rosrun:用于运行单个ROS节点。
工具包详解

rviz:提供3D可视化工具,用于查看和调试ROS节点。
gazebo:提供机器人仿真环境。
rosbag:用于记录和回放ROS消息。
rosrun:用于运行单个ROS节点。
库包详解
tf:提供坐标变换功能。
image_transport:提供图像传输功能。
sensor_msgs:提供传感器消息定义。
geometry_msgs:提供几何消息定义。
系统管理包详解
rosdep:用于管理ROS依赖项。
catkin:提供ROS包的构建和管理工具。
rosbuild:提供ROS包的构建和管理工具(已弃用)。
ROS系统包是ROS系统的核心组成部分,为开发者提供了丰富的功能和工具。了解和掌握ROS系统包,对于进行机器人开发具有重要意义。
相关推荐



教程资讯
教程资讯排行