pid对系统的影响,PID控制器对系统性能的影响分析
时间:2024-12-17 来源:网络 人气:
PID控制器对系统性能的影响分析
在工业自动化和控制系统设计中,PID(比例-积分-微分)控制器因其简单、有效和鲁棒性而被广泛应用。本文将深入探讨PID控制器对系统性能的影响,包括稳定性、响应速度、控制精度等方面。
PID控制器的原理与作用

PID控制器是一种反馈控制器,它通过比例(P)、积分(I)和微分(D)三个环节来调节系统的响应。比例环节根据当前误差调整控制量,积分环节消除稳态误差,微分环节预测误差的变化趋势,从而提高系统的动态性能。
PID控制器对系统稳定性的影响
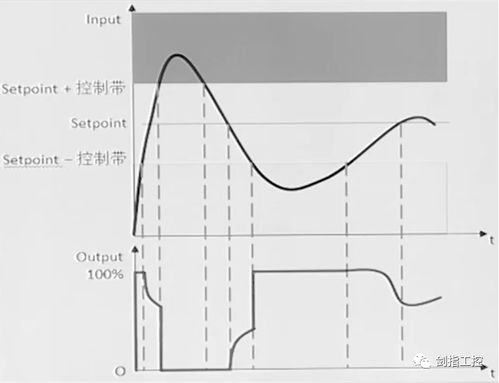
PID控制器的参数设置对系统的稳定性至关重要。适当的参数可以确保系统在受到扰动时能够快速恢复到稳定状态。如果参数设置不当,可能会导致系统不稳定,出现振荡或发散现象。
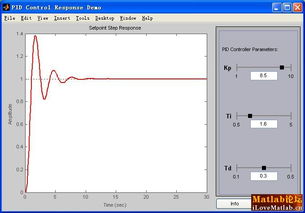
例如,比例增益(Kp)过大可能导致系统响应过快,出现超调;积分增益(Ki)过大可能导致系统响应过慢,稳态误差过大;微分增益(Kd)过大可能导致系统响应过于敏感,出现振荡。
PID控制器对系统响应速度的影响
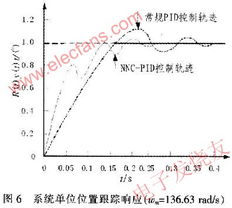
PID控制器的参数设置也会影响系统的响应速度。适当的参数可以使系统在受到扰动时快速响应,减少过渡时间。如果参数设置不当,可能会导致系统响应迟缓,影响生产效率。
例如,增加比例增益(Kp)可以加快系统响应速度,但过大的Kp可能导致系统不稳定;增加微分增益(Kd)可以预测误差的变化趋势,但过大的Kd可能导致系统响应过于敏感。
PID控制器对系统控制精度的影响

PID控制器的参数设置对系统的控制精度也有重要影响。适当的参数可以使系统在稳态时保持较高的控制精度,减少稳态误差。如果参数设置不当,可能会导致系统控制精度下降,影响产品质量。
例如,增加积分增益(Ki)可以消除稳态误差,提高控制精度,但过大的Ki可能导致系统响应过慢;增加微分增益(Kd)可以预测误差的变化趋势,提高控制精度,但过大的Kd可能导致系统响应过于敏感。
PID控制器参数整定方法

为了确保PID控制器在系统中发挥最佳性能,需要对其进行参数整定。常用的参数整定方法包括经验法、试凑法、Ziegler-Nichols方法等。
经验法是根据工程经验来调整参数,适用于简单的控制系统;试凑法是通过不断尝试不同的参数组合来找到最佳参数,适用于复杂控制系统;Ziegler-Nichols方法是一种基于系统阶跃响应的参数整定方法,适用于大多数控制系统。
PID控制器对系统性能有着重要影响,包括稳定性、响应速度和控制精度等方面。通过合理设置PID控制器的参数,可以确保系统在满足性能要求的同时,保持稳定性和可靠性。在实际应用中,应根据具体系统特点选择合适的参数整定方法,以达到最佳控制效果。
相关推荐




教程资讯
教程资讯排行