ros 是什么系统,ROS简介
时间:2024-12-15 来源:网络 人气:
ROS简介

ROS,即Robot Operating System(机器人操作系统),是一个开源的机器人操作系统框架。它为机器人开发者提供了一个强大的工具和库集合,旨在简化复杂机器人系统的开发过程,提高开发效率,并促进代码的复用和共享。
ROS的发展背景
随着机器人技术的快速发展,机器人系统变得越来越复杂,需要整合多种传感器、执行器以及复杂的算法来实现各种任务,如自主导航、物体识别、操作等。传统的软件开发方式在面对这种复杂性时变得效率低下,代码复用性差,不同模块之间的通信和协同工作困难。为了解决这些问题,ROS应运而生。
ROS最初由Willow Garage公司开发,随着开源社区的积极参与和贡献,ROS不断发展壮大,成为机器人领域广泛使用的标准开发框架之一。
ROS的特点
ROS具有以下特点:
分布式架构:ROS采用分布式架构,各个节点可以运行在不同的计算机上,通过网络进行通信。这种架构使得机器人系统可以方便地扩展和分布式部署。
丰富的工具和库:ROS提供了一系列功能丰富的库和工具,包括传感器驱动、运动规划、导航、感知、控制等,帮助开发者快速构建机器人应用。
跨平台性:ROS支持多种操作系统,包括Linux、Windows和macOS,使得开发者可以在不同的平台上进行机器人开发。
社区支持:ROS拥有庞大的开发者社区,提供了大量的教程、文档和示例代码,帮助开发者解决开发过程中遇到的问题。
ROS的应用领域
ROS在以下领域得到了广泛应用:
工业机器人:ROS可以帮助开发者构建智能化的工业机器人,实现自动化生产、装配和检测等任务。
服务机器人:ROS可以用于开发家庭服务机器人、医疗机器人、物流机器人等,为人们提供便捷的服务。
科研教育:ROS是机器人科研和教育的理想平台,可以帮助研究人员和学生们快速搭建机器人实验平台,进行相关研究。
ROS的安装与配置

ROS的安装和配置相对简单,以下是在Ubuntu系统上安装ROS的步骤:
安装依赖包:在Ubuntu系统上安装ROS之前,需要安装一些依赖包,如Python、C++编译器、Make等。
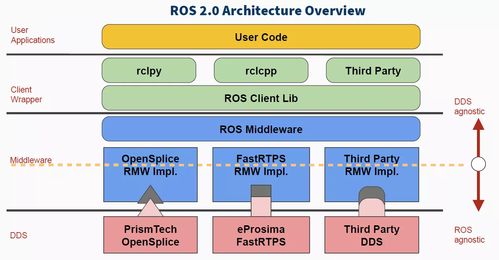
选择ROS版本:ROS有多个版本,如ROS 1和ROS 2。根据需要选择合适的版本进行安装。
配置ROS环境:在安装过程中,需要配置ROS环境变量,以便在命令行中使用ROS命令。
创建工作空间:工作空间是ROS项目的主要目录,用于存放源代码、构建文件等。在安装完成后,需要创建一个工作空间。
安装ROS包:根据需要安装相应的ROS包,如传感器驱动、运动规划库等。
ROS的未来发展
跨平台支持:ROS将继续扩展其跨平台支持,以便在更多操作系统上运行。
性能优化:ROS将不断优化性能,提高机器人系统的响应速度和稳定性。
人工智能集成:ROS将更好地集成人工智能技术,如深度学习、强化学习等,以实现更智能的机器人应用。
ROS作为一种开源的机器人操作系统框架,为机器人开发者提供了丰富的工具和库,简化了机器人系统的开发过程。随着机器人技术的不断发展,ROS将继续在机器人领域发挥重要作用。
ROS 机器人操作系统 开源 Linux Ubuntu 机器人开发 人工智能




教程资讯
教程资讯排行