
ros系统 与 linux,ROS系统简介
时间:2024-12-13 来源:网络 人气:
ROS系统简介

ROS(Robot Operating System,机器人操作系统)是一个开源的机器人软件平台,它为机器人开发提供了丰富的工具和库。ROS由一系列的软件包组成,这些软件包涵盖了机器人开发中的各个方面,包括感知、规划、控制、导航等。ROS的设计理念是模块化,开发者可以根据自己的需求选择合适的软件包进行集成。
Linux系统概述
Linux是一种开源的类Unix操作系统,以其稳定性和安全性著称。Linux系统广泛应用于服务器、嵌入式系统以及个人电脑等领域。ROS系统是基于Linux平台开发的,因此Linux系统为ROS提供了良好的运行环境。
ROS与Linux的兼容性
ROS支持多种Linux发行版,包括Ubuntu、Fedora、Debian等。
ROS的软件包和工具都是基于Linux系统开发的,因此能够充分利用Linux系统的特性。
ROS的编译和运行环境在Linux系统上得到了广泛的测试和验证,确保了系统的稳定性和可靠性。
在Linux上安装ROS
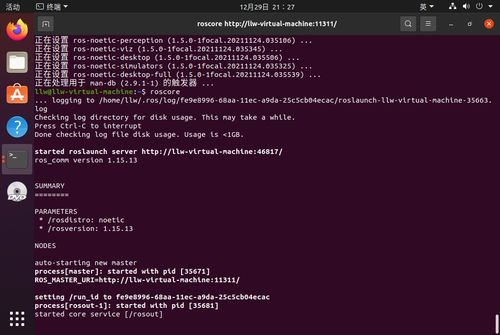
在Linux系统上安装ROS是一个相对简单的过程。以下是在Ubuntu系统上安装ROS Kinetic Kame版本的步骤:
更新系统软件包列表:
sudo apt update
设置ROS的源列表:
sudo sh -c 'echo
作者 小编
相关推荐




教程资讯
教程资讯排行









