ros系统是什么,ROS系统简介
时间:2024-12-12 来源:网络 人气:
ROS系统简介

ROS(Robot Operating System,机器人操作系统)是一个开源的机器人操作系统框架,旨在为机器人开发者提供一个高效、灵活且功能强大的开发环境。它不是一个传统意义上的操作系统,而是一个基于Linux的软件框架,通过简化复杂机器人系统的开发过程,促进代码的复用和共享,使不同功能的模块能够方便地集成在一起,实现复杂的机器人控制任务。
ROS的发展背景
随着机器人技术的快速发展,机器人功能的日益复杂,需要整合多种传感器、执行器以及复杂的算法来实现各种任务,如自主导航、物体识别、操作等。传统的软件开发方式在面对这种复杂性时变得效率低下,代码复用性差,不同模块之间的通信和协同工作困难。为了解决这些问题,ROS应运而生。它最初由Willow Garage公司开发,随着开源社区的积极参与和贡献,ROS不断发展壮大,成为机器人领域广泛使用的标准开发框架之一。
ROS的特点

ROS具有以下特点:
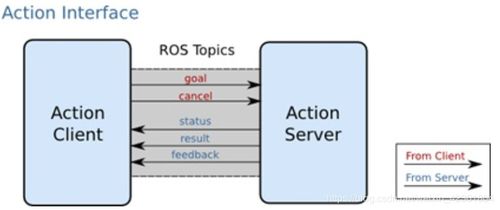
分布式架构:ROS采用分布式架构,各个节点可以运行在不同的计算机上,通过网络进行通信。这种架构使得机器人系统可以方便地扩展和分布式部署。
丰富的工具和库:ROS为开发者提供了丰富的工具和库,包括传感器驱动、运动规划、导航、感知、控制等,大大简化了机器人开发过程。
模块化设计:ROS采用模块化设计,开发者可以根据需求选择合适的模块进行集成,提高了代码的可复用性和可维护性。
跨平台支持:ROS支持多种操作系统,包括Linux、Windows和macOS,方便开发者在不同平台上进行开发。
ROS的工作空间

在ROS生态系统中,工作空间(Workspace)是开发和管理ROS包(Package)的核心环境。工作空间是一个文件系统目录结构,旨在组织和构建ROS包。它提供了一个独立的环境,使开发者能够管理代码、依赖关系及编译过程。通过工作空间,开发者可以轻松地创建、修改和维护ROS包,从而促进协作与代码复用。
典型的ROS工作空间包含以下几个主要目录:
src:源代码目录,存放所有ROS包的源代码。
build:构建目录,用于存放编译过程中生成的中间文件。
devel:开发目录,包含已编译的文件和环境设置脚本。
install(可选):安装目录,用于存放最终安装的文件。
ROS的安装与配置
ROS的安装和配置过程相对简单。以下是在Ubuntu 20.04下安装ROS Noetic Ninjemys的步骤:
配置ROS Noetic的安装源
更新系统软件包
安装ROS Noetic
配置环境变量
创建工作空间
安装依赖包
ROS的应用

ROS在机器人领域有着广泛的应用,包括:
自主导航:利用ROS中的导航功能包,机器人可以实现自主导航,避开障碍物,到达指定位置。
物体识别:通过ROS中的感知功能包,机器人可以识别和跟踪物体,实现抓取、放置等操作。
运动规划:ROS中的运动规划功能包可以帮助机器人规划路径,实现精确的运动控制。
人机交互:ROS提供了丰富的工具和库,方便开发者实现人机交互功能,如语音识别、手势识别等。
ROS是一个功能强大、易于使用的机器人操作系统框架,为机器人开发者提供了一个高效、灵活的开发环境。随着机器人技术的不断发展,ROS在机器人领域的应用将越来越广泛。
相关推荐




教程资讯
教程资讯排行