
piv系统组成,PIV系统组成详解
时间:2024-12-02 来源:网络 人气:
PIV系统组成详解
粒子图像测速(Particle Image Velocimetry,简称PIV)技术是一种非接触式、全场测量流体速度场的方法。它通过捕捉流体中悬浮粒子的运动轨迹,从而分析出流体的速度分布。本文将详细介绍PIV系统的组成及其工作原理。
一、PIV系统的基本组成
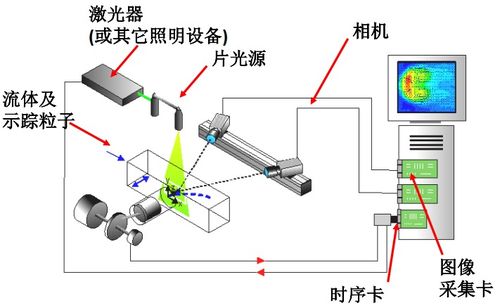
PIV系统主要由以下几个部分组成:
粒子发生器:用于产生悬浮在流体中的微小粒子,这些粒子作为流体的示踪剂。
激光器:产生激光束,用于照射流体中的粒子,使其在激光束的照射下形成可见的图像。
相机:捕捉激光照射下粒子形成的图像,并将图像传输到计算机进行分析。
图像处理软件:对捕获的图像进行处理,分析粒子的运动轨迹,从而得到流体的速度场信息。
控制系统:负责控制激光器、相机等设备的运行,确保实验的顺利进行。
二、粒子发生器
粒子发生器是PIV系统的重要组成部分,其作用是产生悬浮在流体中的微小粒子。常见的粒子发生器有雾化器、喷嘴等。雾化器通过将液体雾化成微小颗粒,使其悬浮在流体中;喷嘴则通过高速喷射流体,使流体中的颗粒分散开来。粒子发生器产生的粒子应满足以下条件:
粒径适中:粒径过小,容易受到流体湍流的影响;粒径过大,则难以捕捉到粒子的运动轨迹。
均匀分布:粒子在流体中的分布应均匀,以保证测量的准确性。
稳定性:粒子在流体中的稳定性要好,不易发生团聚或沉淀。
三、激光器
激光器是PIV系统的核心设备,其作用是产生激光束照射流体中的粒子。激光器应满足以下要求:
波长:激光器的波长应与粒子的散射特性相匹配,以保证粒子在激光束照射下形成可见的图像。
功率:激光器的功率应足够大,以保证在较远的距离上也能照射到粒子。
稳定性:激光器的输出功率应稳定,以保证实验的重复性。
四、相机
相机是PIV系统的关键设备,其作用是捕捉激光照射下粒子形成的图像。相机应满足以下要求:
分辨率:相机的分辨率应足够高,以保证捕捉到粒子的运动轨迹。
帧率:相机的帧率应足够高,以保证捕捉到粒子在不同时刻的位置信息。
曝光时间:相机的曝光时间应适中,以保证在较暗的环境下也能捕捉到粒子图像。
五、图像处理软件

图像处理软件是PIV系统的核心,其作用是对捕获的图像进行处理,分析粒子的运动轨迹,从而得到流体的速度场信息。图像处理软件应具备以下功能:
图像预处理:对捕获的图像进行预处理,如去噪、滤波等。
图像配准:将多帧图像进行配准,消除图像之间的差异。
粒子识别:识别图像中的粒子,并提取粒子的运动轨迹。
速度场分析:根据粒子的运动轨迹,分析流体的速度场信息。
六、控制系统
控制系统负责控制激光器、相机等设备的运行,确保实验的顺利进行。控制系统应具备以下功能:
设备控制:控制激光器、相机等设备的开关、曝光时间、帧率等参数。
数据采集:采集激光器、相机等设备产生的数据,并传输到计算机进行分析。
实验参数设置:设置实验参数,如粒子浓度、激光器功率、相机分辨率等。




教程资讯
教程资讯排行









