ros操作系统下载,ROS操作系统下载与安装指南
时间:2024-12-01 来源:网络 人气:
ROS操作系统下载与安装指南

ROS(Robot Operating System,机器人操作系统)是一个用于机器人开发的跨平台、开源的软件框架。它提供了丰富的库和工具,帮助开发者构建、测试和部署机器人应用程序。本文将详细介绍如何在不同的操作系统上下载和安装ROS。
一、选择ROS版本
在开始下载之前,首先需要确定要安装的ROS版本。ROS有多个版本,包括Melodic Morenia、Noetic Nirvana、Buster Beagle等。每个版本都有其特点和兼容性。建议根据你的项目需求和硬件配置选择合适的版本。
二、下载ROS

1. 访问ROS官方网站(http://www.ros.org/),选择合适的版本。
2. 点击“Download”按钮,进入下载页面。
3. 根据你的操作系统选择相应的下载链接。以下是不同操作系统的下载
Ubuntu:http://packages.ros.org/ros/ubuntu/
Debian:http://packages.ros.org/ros/debian/
Windows:http://www.ros.org/repositories/
MacOS:http://www.ros.org/repositories/
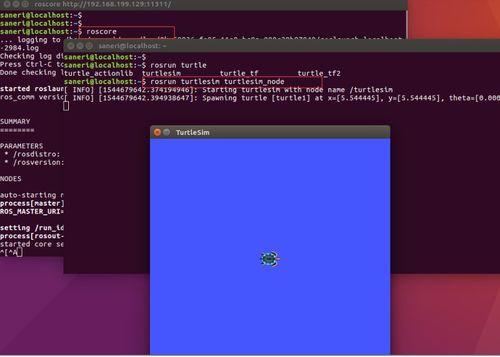
三、安装ROS
1. Ubuntu和Debian系统:
(1)打开终端。
(2)输入以下命令,更新系统包列表:
sudo apt-get update
(3)安装ROS依赖项:
sudo apt-get install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
(4)运行以下命令,安装ROS包管理器:
sudo apt-get install ros-[ros-version]-desktop-full
(5)设置环境变量:
echo


教程资讯
教程资讯排行