simulink的pid控制系统,原理、应用与仿真
时间:2024-11-20 来源:网络 人气:
深入解析Simulink PID控制系统:原理、应用与仿真
随着自动化技术的不断发展,PID(比例-积分-微分)控制算法因其简单、可靠和易于实现的特点,被广泛应用于各种工业控制系统中。Simulink作为MATLAB的一个模块,提供了强大的仿真工具,可以帮助我们设计和测试PID控制系统。本文将深入解析Simulink PID控制系统的原理、应用以及仿真过程。
一、PID控制系统的基本原理
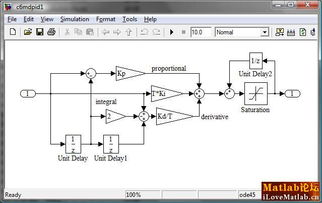
PID控制器是一种反馈控制器,它通过比较设定值和实际值之间的误差,来调整控制器的输出,从而实现对系统的控制。PID控制器由三个部分组成:比例(P)、积分(I)和微分(D)。
比例(P)部分:根据误差的大小直接调整控制器的输出,误差越大,输出越大。
积分(I)部分:根据误差的累积值调整控制器的输出,误差累积越大,输出越大。
微分(D)部分:根据误差的变化率调整控制器的输出,误差变化越快,输出越大。
二、Simulink PID控制系统的应用
Simulink PID控制系统在各个领域都有广泛的应用,以下列举几个典型应用场景:
工业自动化:如电机控制、温度控制、压力控制等。
航空航天:如飞行器姿态控制、发动机控制等。
机器人控制:如机器人运动控制、路径规划等。
生物医学:如医疗设备控制、生物信号处理等。
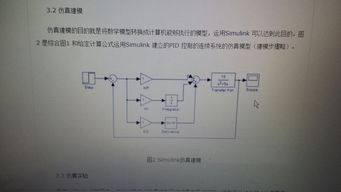
三、Simulink PID控制系统的仿真过程
在Simulink中,我们可以通过以下步骤进行PID控制系统的仿真:
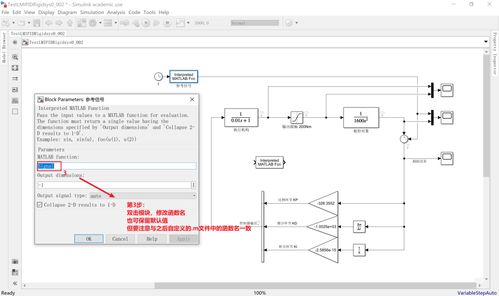
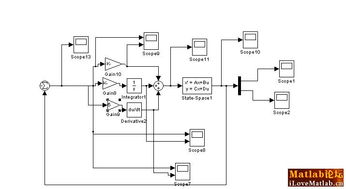
创建Simulink模型:在Simulink中创建一个新的模型,添加所需的模块,如输入信号、PID控制器、输出信号等。
配置PID控制器参数:根据实际系统需求,设置PID控制器的比例、积分和微分参数。
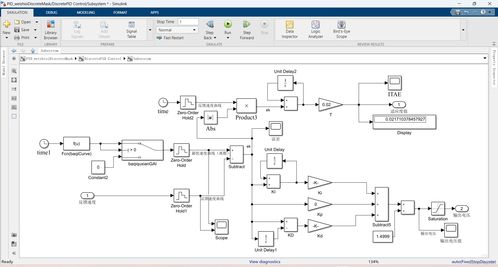
添加仿真工具:在模型中添加仿真工具,如示波器、记录器等,用于观察和分析系统性能。
运行仿真:启动仿真,观察系统输出信号的变化,分析系统性能。
调整参数:根据仿真结果,调整PID控制器的参数,优化系统性能。
四、Simulink PID控制系统的优化方法
在Simulink中,我们可以通过以下方法对PID控制系统进行优化:
自动调参:Simulink提供了自动调参工具,可以帮助我们快速找到最优的PID控制器参数。
仿真优化:通过改变仿真参数,如仿真时间、步长等,优化仿真结果。
模型简化:对复杂模型进行简化,提高仿真效率。
Simulink PID控制系统是一种简单、可靠的控制方法,在各个领域都有广泛的应用。通过Simulink的仿真工具,我们可以方便地设计和测试PID控制系统,优化系统性能。本文对Simulink PID控制系统的原理、应用和仿真过程进行了深入解析,希望对读者有所帮助。




教程资讯
教程资讯排行