ros操作系统 浅析,ROS操作系统简介
时间:2024-11-18 来源:网络 人气:
ROS操作系统简介
ROS(Robot Operating System,机器人操作系统)是一个开源的机器人开发框架,由 Willow Garage 开发,后由 Open Robotics 维护。ROS 提供了一系列工具和库,用于开发、模拟和测试机器人应用。它广泛应用于工业、科研和学术领域,是机器人开发领域的事实标准。
ROS的核心概念
ROS 的核心概念包括节点(Nodes)、话题(Topics)、服务(Services)、动作(Actions)和参数服务器(Parameter Server)。这些概念构成了 ROS 的通信机制,使得不同的组件之间能够相互通信和协作。
节点:ROS 中的每个进程都是一个节点,它负责执行特定的任务。
话题:节点之间通过发布和订阅话题进行通信。发布者发布消息,订阅者接收消息。
服务:节点之间可以通过请求和响应服务进行交互。请求者发送请求,服务提供响应。
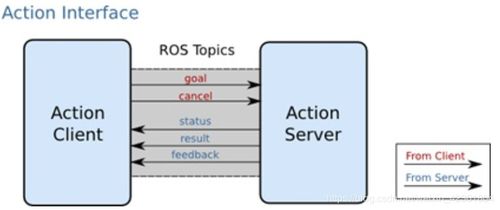
动作:动作类似于服务,但它支持异步操作。动作请求者发送请求,动作服务器执行操作并返回结果。
参数服务器:参数服务器存储和检索系统参数,如机器人配置参数。
ROS的架构
ROS 的架构分为多个层次,包括底层、中间层和高层。
底层:包括操作系统、硬件抽象层和底层驱动程序,负责与硬件设备进行交互。
中间层:包括节点管理器、通信机制和工具,负责节点之间的通信和协作。
高层:包括各种库和工具,如感知、导航、控制等,用于实现机器人应用的功能。
ROS的安装与配置
ROS 支持多种操作系统,包括 Ubuntu、Fedora 和 macOS。以下是在 Ubuntu 上安装和配置 ROS 的基本步骤:
更新系统软件包:
sudo apt update
安装 ROS 包管理器:
sudo apt install ros-noetic-desktop-full
设置环境变量:
echo




教程资讯
教程资讯排行