ros系统硬件,ROS系统硬件配置指南
时间:2024-11-18 来源:网络 人气:
ROS系统硬件配置指南
随着机器人技术的不断发展,ROS(Robot Operating System)已经成为机器人开发领域的事实标准。ROS系统不仅提供了丰富的软件库和工具,还支持多种硬件平台的集成。本文将为您详细介绍ROS系统的硬件配置,帮助您快速搭建一个适合自己项目的机器人平台。
一、选择合适的硬件平台
PC平台:适用于开发较为复杂的机器人项目,如移动机器人、无人机等。PC平台具有强大的计算能力和丰富的接口资源,但体积较大,功耗较高。
嵌入式平台:适用于资源受限的机器人项目,如小型机器人、智能硬件等。嵌入式平台体积小、功耗低,但计算能力相对较弱。
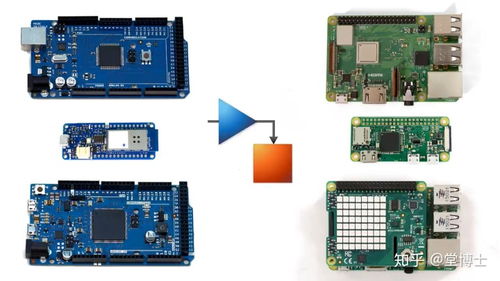
机器人专用平台:如Raspberry Pi、BeagleBone Black等,这些平台专为机器人开发设计,具有丰富的接口和良好的兼容性。
二、安装ROS系统
选择好硬件平台后,接下来需要安装ROS系统。以下以Ubuntu 18.04为例,介绍ROS系统的安装步骤:
更新系统:
sudo apt update
sudo apt upgrade
安装ROS依赖包:
sudo apt install -y python-rosdep python-rosinstall-generator python-wstool python-rosinstall
创建ROS工作空间:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws
catkin_make
配置环境变量:
echo
作者 小编



教程资讯
教程资讯排行