ros系统架构,ROS系统架构概述
时间:2024-11-17 来源:网络 人气:
ROS系统架构概述
ROS(Robot Operating System,机器人操作系统)是一个开源的机器人软件框架,旨在为机器人开发提供一套标准化的工具和库。ROS系统架构设计旨在解决机器人开发中的复杂性问题,通过模块化的设计,使得开发者可以专注于特定功能的实现,而无需从头开始构建整个系统。
ROS的核心概念
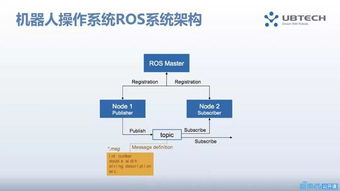
ROS的核心概念包括节点(Node)、话题(Topic)、服务(Service)和动作(Action)等。
节点(Node):在ROS中,每个独立运行的程序或模块都称为一个节点。节点可以是一个传感器数据处理程序、一个控制算法或者一个路径规划器等。
话题(Topic):ROS采用发布-订阅模式进行节点间的数据传输。发布者将数据发布到某个话题上,而订阅者可以通过订阅这个话题来接收数据。
服务(Service):服务是一种请求-响应的通信方式。客户端发送请求到服务端,服务端处理请求并返回响应。
动作(Action):动作是一种异步的请求-反馈-结果通信方式。客户端发送一个动作请求,服务端处理请求并返回反馈,最后返回结果。
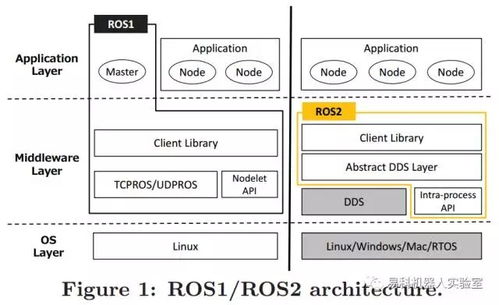
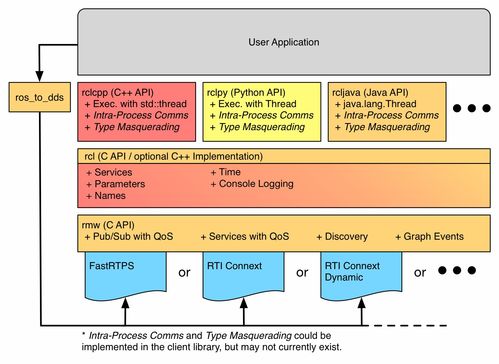
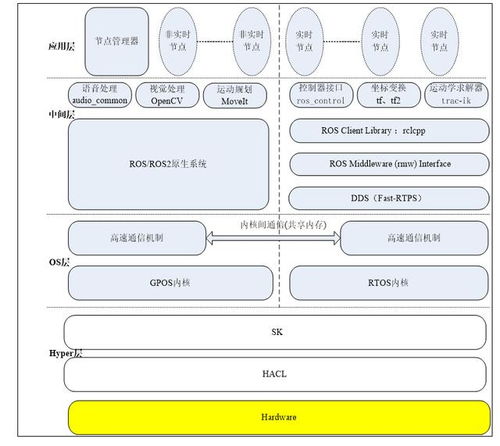
ROS的系统架构
ROS的系统架构可以分为以下几个层次:
底层硬件抽象层:这一层负责与机器人硬件进行交互,包括传感器、执行器等。ROS提供了丰富的硬件接口库,如URDF(Unified Robot Description Format)用于描述机器人模型,Gazebo用于仿真等。
中间层:这一层负责处理传感器数据、执行器控制和路径规划等任务。ROS提供了大量的工具和库,如TF(Transforms)用于坐标变换,ROS Navigation用于路径规划等。
应用层:这一层是用户自定义的模块,用于实现特定的机器人功能。开发者可以根据自己的需求,利用ROS提供的工具和库来开发自己的应用。
ROS的通信机制
ROS的通信机制是其架构的核心,主要包括以下几种:
话题(Topic):发布者将数据发布到话题上,订阅者可以订阅这个话题来接收数据。话题是ROS通信的基础,用于实现节点间的数据共享。
服务(Service):服务是一种请求-响应的通信方式。客户端发送请求到服务端,服务端处理请求并返回响应。服务通常用于执行一些需要计算的任务。
动作(Action):动作是一种异步的请求-反馈-结果通信方式。客户端发送一个动作请求,服务端处理请求并返回反馈,最后返回结果。动作通常用于执行一些需要长时间运行的任务。
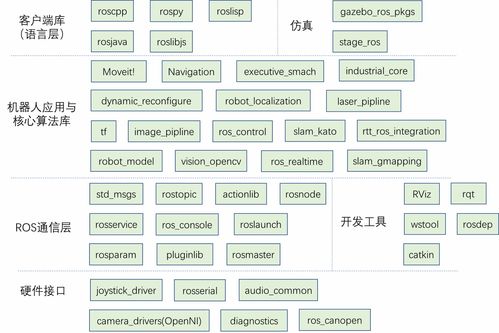
ROS的生态系统
ROS拥有一个庞大的生态系统,包括以下方面:
社区支持:ROS拥有一个活跃的社区,开发者可以在这里找到技术支持、交流经验和分享资源。
工具和库:ROS提供了丰富的工具和库,如rviz用于可视化、gazebo用于仿真、rosbag用于数据记录和分析等。
机器人平台:ROS支持多种机器人平台,如TurtleBot、UR5等,使得开发者可以方便地使用ROS进行机器人开发。
ROS系统架构以其模块化、可扩展性和易用性,成为了机器人开发领域的事实标准。通过ROS,开发者可以快速构建和部署机器人系统,从而推动机器人技术的快速发展。




教程资讯
教程资讯排行