
matlab控制系统仿真与实例详解,MATLAB控制系统仿真与实例详解
时间:2024-11-15 来源:网络 人气:
MATLAB控制系统仿真与实例详解
随着科学技术的不断发展,控制系统在各个领域都扮演着至关重要的角色。MATLAB作为一种功能强大的数学计算软件,在控制系统仿真中具有广泛的应用。本文将详细介绍MATLAB控制系统仿真的基本原理,并通过具体实例进行详解。
一、MATLAB控制系统仿真概述
MATLAB控制系统仿真是指利用MATLAB软件对控制系统进行建模、分析和设计的过程。通过MATLAB,我们可以方便地建立控制系统的数学模型,进行仿真实验,并优化控制策略。
二、MATLAB控制系统仿真基本步骤
1. 建立控制系统模型:根据实际控制系统,利用MATLAB的符号计算工具箱或控制系统工具箱建立数学模型。
2. 仿真实验:通过MATLAB的仿真工具箱(如Simulink)对控制系统进行仿真实验,观察系统在不同输入信号下的动态响应。
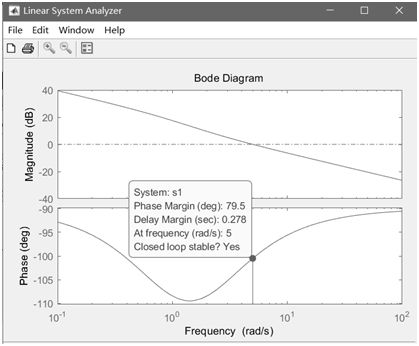
3. 分析结果:对仿真结果进行分析,评估控制系统的性能,如稳定性、响应速度、超调量等。
4. 优化控制策略:根据仿真结果,对控制系统进行优化,提高控制性能。
三、MATLAB控制系统仿真实例详解
以下以一个简单的PID控制器为例,详细介绍MATLAB控制系统仿真的过程。
1. 建立PID控制器模型
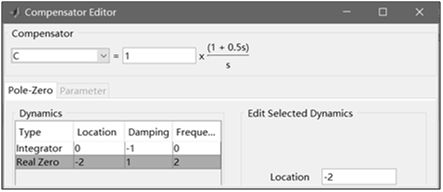
首先,我们需要建立一个PID控制器的数学模型。PID控制器由比例(P)、积分(I)和微分(D)三个部分组成,其传递函数可以表示为:
G(s) = Kp + Ki/s + Kds
其中,Kp、Ki和Kd分别为比例、积分和微分系数。
2. 仿真实验
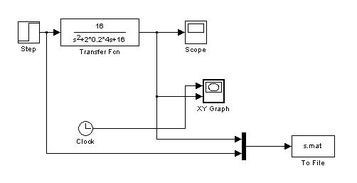
在Simulink中,我们可以通过以下步骤进行仿真实验:
(1)打开Simulink,创建一个新的模型。
(2)在模型中添加PID控制器模块,设置比例、积分和微分系数。
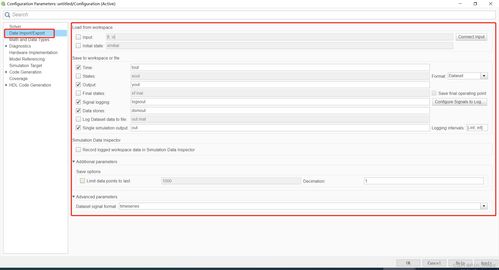
(3)添加输入信号和输出信号,设置仿真参数。
(4)运行仿真,观察系统在不同输入信号下的动态响应。
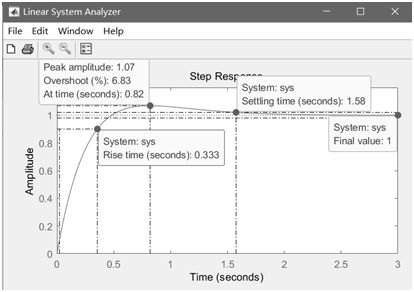
3. 分析结果
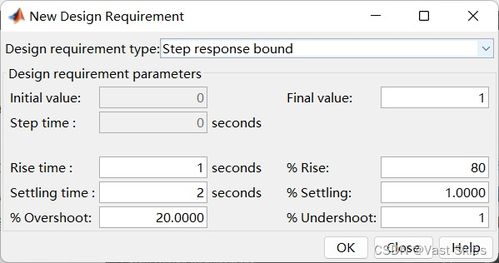
(1)上升时间:系统从初始状态到达期望值所需的时间。
(2)超调量:系统响应曲线超过期望值的最大幅度。
(3)调节时间:系统响应曲线达到并保持在期望值附近所需的时间。
(4)稳态误差:系统在稳态时与期望值的偏差。
4. 优化控制策略
根据仿真结果,我们可以对PID控制器的系数进行调整,以优化控制性能。例如,通过调整比例系数Kp,可以改变系统的响应速度;通过调整积分系数Ki,可以减小稳态误差;通过调整微分系数Kd,可以提高系统的抗干扰能力。
本文详细介绍了MATLAB控制系统仿真的基本原理和实例详解。通过MATLAB仿真,我们可以方便地对控制系统进行建模、分析和设计,为实际工程应用提供有力支持。
相关推荐




教程资讯
教程资讯排行









